

多星RTK北斗的全面应用使得高精度定位进入多星时代。多星定位在城市测量中更有优势。
RTK定位原理
RTK技术是全球卫星导航定位技术与数据通信技术相结合的载波相位实时动态差分定位技术。
▌

单点解———差分解———浮点解———固定解
▌
浮点解———挑选一个较好的解算结果——形成置信区间——对区间内的每一个结果进行检验——检验出合格的解算成果——固定解
载波的特点
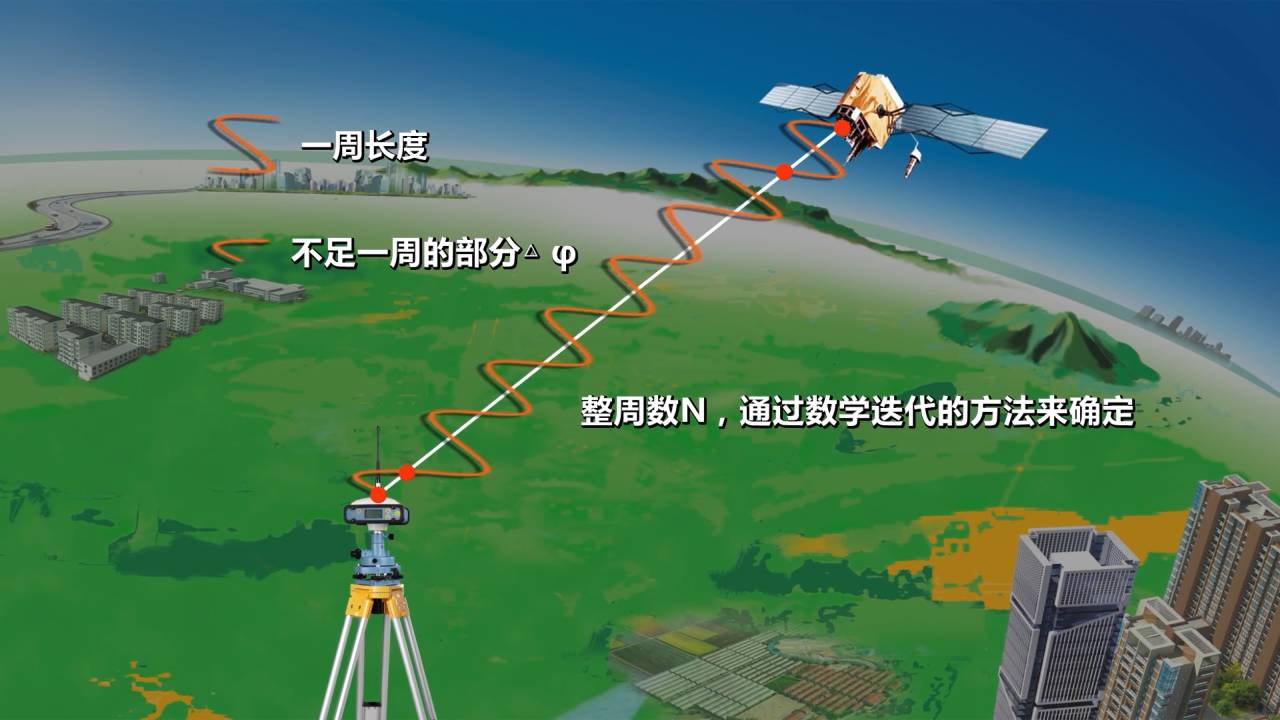
一种电磁波,周期性,波长短(L1 19cm)。电磁波测距仪、全站仪等使用的就是电磁波测距技术。
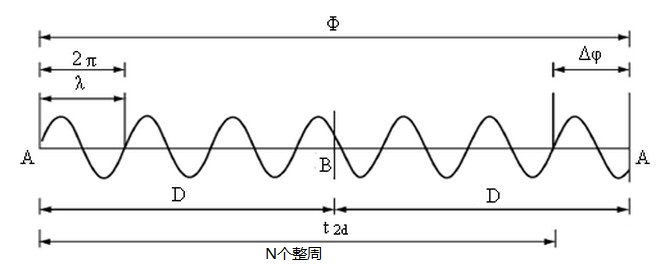
使用鉴相器技术可精确观测出不足一周的部分△φ
►如何确定经历了多少个整周数N,是载波相位观测过程中的重点。整周数N叫做整周未知数(整周模糊度),这个过程叫做整周模糊度的确定。
分析
影响RTK测量的因素:
多路径效应
卫星遮挡
电离层误差
阴影效应
多路径效应
在GPS测量中,被测站附近的反射物所反射的卫星信号(反射波)如果进入接收机天线,就将和直接来自卫星的信号(直射波)产生干涉,从而使观测值偏离真值,产生所谓的“多路径误差”。这种由于多路径的信号传播所引起的干涉时延效应被称做多路径效应。

遮挡
卫星遮挡是直接影响RTK测量效率的因素

电离层延迟
电离层是高度在60~1000km间的大气层。电磁波信号(如GPS卫星所发射的信号)在穿过电离层时,其传播速度会发生变化;其传播路径也会略微弯曲;从而使得测距结果产生差异。

▌
解决办法
RTK测量误差控制方法
RTK测量注意事项
RTK质量评价标准
一、RTK测量误差控制方法
控制坐标转换精度
►选好基准站。
►质量控制
通常采用已知点检核比较法、重测比较法和电台变频检核法等。
►控制RTK作业半径(5~10km)。
►卫星预报(选择PDOP小的时段进行)。
►避开电离层活跃的时间(12~16点)。
►选取标准精度高的品牌仪器 。
►作业的规范性(对中,整平,量高等) 。
►重复观测 。
RTK测量质量控制方法
►快速静态比较法
进行RTK测量的同时,对某些RTK点再做一次快速静态观测,事后对这些点的RTK成果和快速静态成果进行比较分析,以检查RTK成果是否有质量问题。
►重测比较法
每次重新初始化成功后,先重测附近已测过的RTK点1~3 个,并现场比较其成果,看是否一致。
►穿线比较法
在某一部分测区的RTK基本完成后,重新布测一条RTK测量链,用于对整个测区内的RTK成果进行质量控制。
►电台变频法
两套基准站,发射频率不同,流动站能切换接受频率。
如何消除RTK测量的野值
►RTK测量具有显著的实时、快捷等优点,但其初始化(整周模糊值)的置信度通常为95%~99% ,且作业中缺乏检核条件,个别点可能会出现粗差,作业中必须注重成果的复核。
►在同一个点上,待数据稳定后,进行多次初始化对比,取多次观测的平均值。
►在同一个点上待数据稳定后,将接收机关机,稍后重新开机,再对该点进行初始化对比。
►多时段(上下午各观测一次或隔天)重复观测同一个点,并对比结果 。
如何消除RTK测量的野值
实践证明,观测者的专业技术水平、经验及工作态度等对成果的精度和可靠性影响很大。
整数模糊度正确固定是前提
►固定模糊度的时间和可靠性取决于四个因素 p 即接收机类型(单频或双频)。
►双频RTK初始化的时间比单频RTK要短p 所观测卫星的个数。
►解算时采用的星数越多,RTK的精确性和可靠性越好p 移动站至基准站的距离。
►移动站至基准站的距离越近,其初始化的时间也越短n RTK软件质量。
►采用的算法越先进,初始化时间越短,可靠性越高 。
二、RTK测量注意事项
作业半径的大小
►移动站离开基准站的最大距离称作RTK的作业半径,它的大小取决于基准站电台信号的传输距离,且对RTK测量的速度和精度有着直接影响。
►实验表明,当两山顶能够通视,移动站距基准站47 km时, 也可收到差分信号。但是,在城镇作业时,如果两点之间 有较高的房屋遮挡,即使相距1 km也很难进行RTK测量 。
►如果在建筑物或树木比较多的地区作业,移动站接收电台的信号会比较弱且容易失锁,而且高程精度较差。 RTK的作业半径控制在10 km以内为宜。
►当信号受影响严重时,还应进一步缩短作业半径,以提高RTK测量的精度和速度。
RTK测量注意事项
►测量时置信度必须设置在99.9%,在固定状态且HRMS≤0.02,VRMS ≤0.02时方可进行数据采集n HRMS和VRMS越小,RTK点位坐标收敛越快,定位的精 度也就越高。
►如果RTK定位收敛很慢,获得固定解需要几十秒甚至几分钟,这时手簿上显示的收敛值可能不真实,定位误差可能会很大。
RTK测量注意事项
►观测卫星的图形强度要高。在进行坐标解算时,所采用的卫星数越多,分布越均匀,则PDOP值越小,RTK的精确性和可靠性越高,且初始化的时间也越短。
►一般情况下,在接收卫星数保持5颗以上,且PDOP< 6 时,才能进行RTK测量。
►作业时,接收机的对中、整平、天线高的量取及输入已知点坐标、坐标转换参数及天线高等数据的任何误差,都将 影响RTK测量的全部坐标。
RTK测量注意事项
►使用RTK方法测定的坐标可以是观测一个历元的结果,也可以是几个历元的平均值。
►对于纯动态定位而言,只能取一个历元的观测值;在一般的RTK测量中,通常是取几个历元的平均值,以消除偶然噪声,提高定位精度。
►当用RTK方法进行控制测量时,为了保证测量成果的精确、可靠,宜采用多历元的观测结果。
►在定位精度要求较高的应用中,观测时应使用三脚架固定 移动站的天线,进行严格的对中、整平,并远离各种强电磁干扰源和大面积的信号反射物。
三、RTK质量评价标准
RTK作业可用性问题
►可用性问题:初始化时间过长,主要受卫星数、电离层、多路径等综合影响。
►空间可用性
距离:一般作业不要超过10~15km,南方地区更短 。
环境:实验表明,距离地面1-2米的地方多路径影响最为明显。
►时间可用性
时间段:避免中午及下午电离层高峰时期的作业。
卫星数:6颗卫星作业较为可靠 。
(2) RTK作业中可靠性的问题
►可靠性问题:固定解的可靠程度。
►精度指标:各种仪器给出的RTK精度实际上是固定整周后的定位精度(内符合),不是与已知结果的比较(外符合)。
►整周模糊度固定:某些情况下固定的整周数是错误的,内符合很好,但外符合很差。
►可靠性指标:某些仪器给出了95%、99%或99.999%的置信指标,实际是可靠性指标,即达到正常精度的概率。
(3) RTK作业中适用性和定位延迟
►适用性问题:遮挡条件下的作业
原因:遮挡造成信号失锁,导致重新搜索整周
►解决方法:
单历元整周模糊度的固定,但目前的算法可靠性不高,是目前的研究热点。
►运动中初始化:
OTF,必须具备双频,采样率提高会有一定的改善。
►定位延迟
原因:信号传输、数据处理时延。
——(完)——
 首页
首页